System obsługi obudów robotów

Zadanie
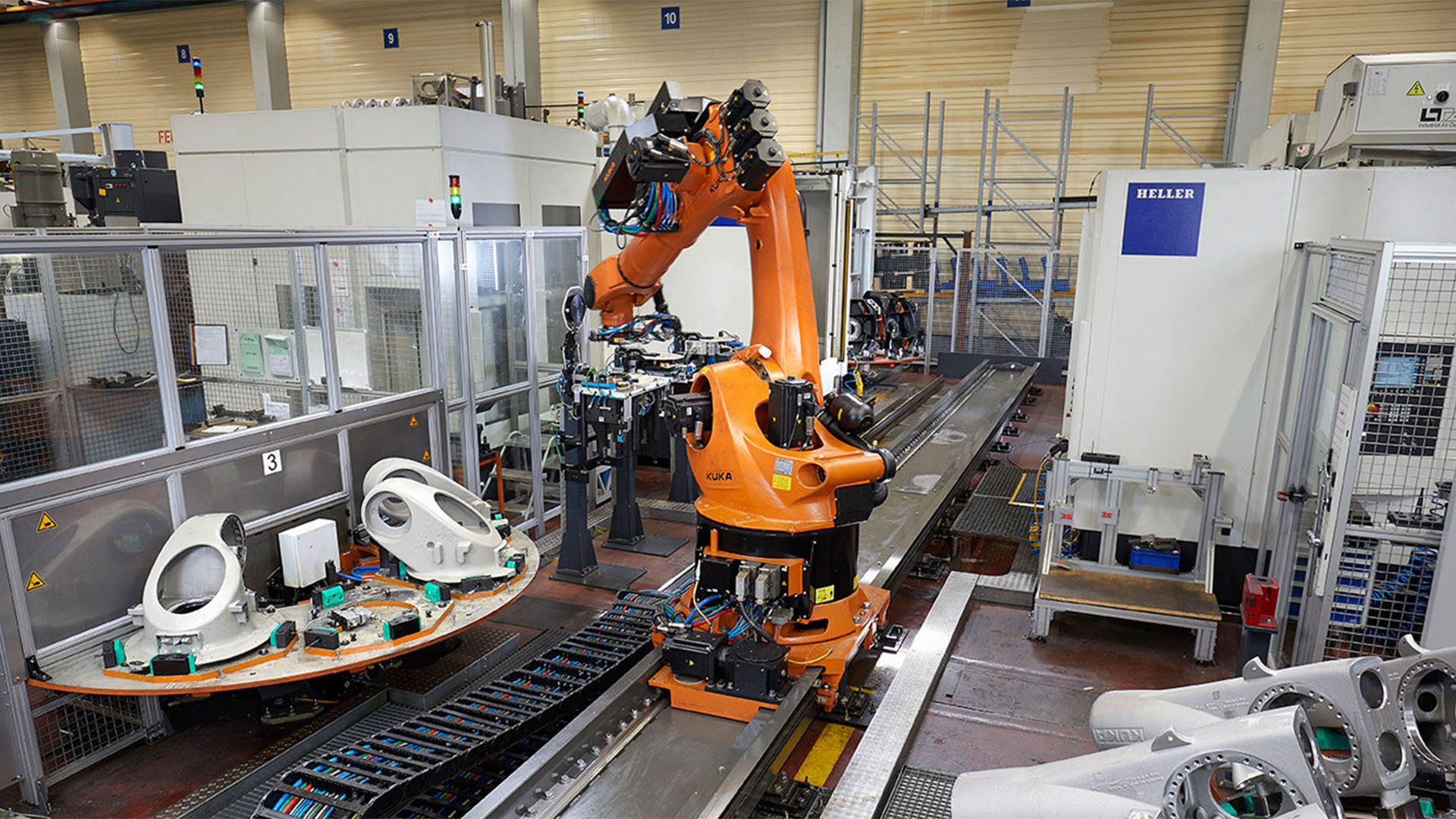
Trzy centra obróbcze miały być połączone z robotem. Ponieważ automatyzacja została zmodernizowana, zapotrzebowanie na miejsce, a tym samym rozmiar robota, było ograniczone. Maszyny miały być również używane do bardzo dużej różnorodności części.
Rozwiązanie
Ze względu na różnorodność części zastosowano automatyczną zmianę chwytaków. Chwytaki zostały zaprojektowane w taki sposób, aby zoptymalizować ich wagę, co pozwoliło na zastosowanie kompaktowego robota.
Najważniejsze informacje i dane techniczne
 IP40
IP40 Pneumatyczne
Pneumatyczne Chwyt od zewnątrz
Chwyt od zewnątrz Chwyt od wewnątrz
Chwyt od wewnątrz
Dane techniczne
| Rodzaj napędu | PNEU |
| Maks. siła chwytania | 6600 [N] |
| Wizualizacja graficzna | FORM |
| Zabezpieczenie chwytaka | KLE |
| Skok maks. | 200 [mm] |
| Klasa IP | IP40 |
| Waga systemu | 112 [kg] |